Linux контроллер JetHome JetHub H1

Подсказка
Контроллер можно приобрести на сайте производителя: http://jethome.ru/h1/
Общее описание
Контроллер JetHome JetHub H1 предназначен для построения систем домашней автоматизации и мониторинга: опрос датчиков, использование в качестве устройства сбора и передачи данных, выполнение функций ПЛК в системах «умного дома».
Производительный четырехъядерный процессор JetHome JetHub H1 позволит использовать его в качестве центрального контроллера в системах «умного дома» совместно с различными беспроводными датчиками Wi-Fi и ZigBee других производителей.
Корпус контроллера выполнен в лаконичном современном дизайне, который позволит вписаться в любой интерьер.
Характеристики
Четырехъядерный процессор Amlogic S905W (ARM Cortex-A53) с рабочей частотой до 1,2 ГГц.
Оперативная память 1 ГБайт или 2 ГБайт DDR3.
Энергонезависимая память eMMC flash 8 ГБайт, 16 ГБайт или 32ГБайт.
Конструкция
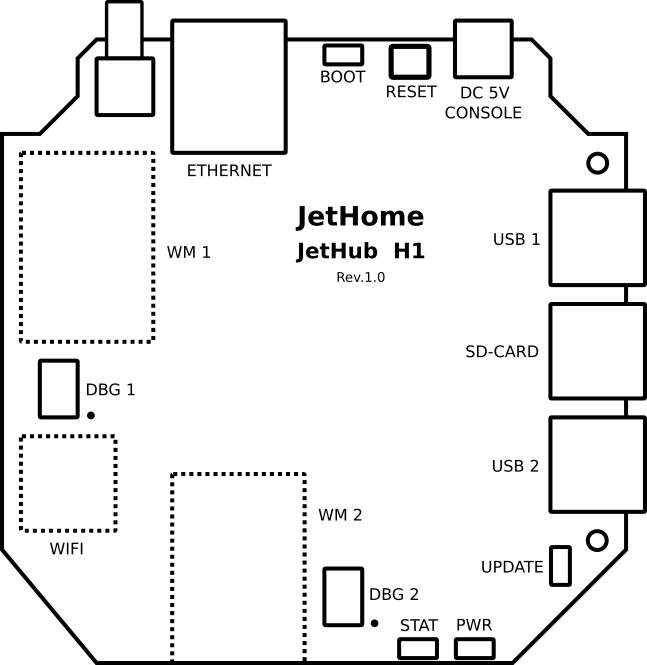
На рисунке обозначены:
ETHERNET- разъем Ethernet.
DC 5V/CONSOLE- разъем MicroUSB для питания контроллера и вывода Linux-консоли.
USB 1- разъем USB для подключения внешних устройств и прошивки контроллера.
USB 2- разъем USB для подключения внешних устройств.
SD-CARD- слот для подключения карт памяти MicroSD.
WIFI- модуль Wi-Fi/Bluetooth.
WM 1- основной модуль для связи с беспроводными устройствами (Zigbee).
WM 2- дополнительный модуль для связи с беспроводными устройствами (опционально).
DBG 1- разъем для прошивки основного беспроводного модуля.
DBG 2- разъем для прошивки дополнительного беспроводного модуля.
BOOT- кнопка для переключения режима загрузки. Доступ к кнопке осуществляется через отверстие в корпусе контроллера. Не используйте острых предметов и не прикладывайте большого усилия при нажатии на кнопку.
RESET- кнопка аппаратного сброса контроллера.
UPDATE- контакты для отключения встроенной eMMC флэш памяти (используются при восстановлении прошивки контроллера).
PWR- зеленый светодиод индикации наличия питания.
STAT- синий пользовательский светодиод.
Размеры и масса
Габаритные размеры: 100 x 97 x 20 мм;
Масса без блока питания: 120 г
Коммуникации
Интегрированный двухдиапазонный (2,4 ГГц и 5 ГГц) модуль беспроводной связи Wi-Fi/Bluetooth Realtek RTL8822CS. Поддерживает стандарты Wi-Fi IEEE 802.11a/b/g/n/ac, 2×2 MIMO, а также Bluetooth 5.0.
Ethernet IEEE 802.3 10/100 Мбит/с.
Модуль беспроводной связи Zigbee TI CC2538 + CC2592 или TI CC2652P1 с выходной мощностью до 20 дБм и поддержкой стандарта Zigbee 3.
Интерфейсы
Поддержка карт MicroSD 2.x/3.x/4.x DS/HS;
2 x USB 2.0 high-speed;
Serial-консоль выведена на разъем питания MicroUSB.
Светодиоды
См.также
На плате контроллера установлены два светодиода:
Светодиод |
Вывод |
Linux1 |
gpiolib |
Active low |
|---|---|---|---|---|
Синий |
GPIODV_24 |
596 (585) |
26 |
1 |
Зеленый |
Индикация наличия питания |
- 1
в скобках указаны значения для Linux Kernel версии менее 6.2
Беспроводной модуль (Zigbee)
На материнской плате контроллера имеется посадочное место для установки беспроводного модуля. В зависимости от конфигурации контроллера, на плате может быть установлен беспроводной модуль (см. Zigbee модули PCBA).
Рядом с посадочным местом для беспроводного модуля на материнской плате контроллера расположен разъем WM DBG, предназначенный для отладки или прошивки беспроводного модуля:
JTAG (WM DBG):
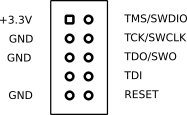
Модуль подключен к порту UARTAO_B процессора,
аппаратное управление приемом/передачей (линии RTS и CTS) не используется.
Устройство отображается в системе как /dev/ttyAML2.
Для управления беспроводным модулем используются GPIO процессора, которые
подключены к линиям RESET и BOOT беспроводного модуля (см. Работа с дискретным выходами в Linux)
Вывод модуля |
Вывод CPU |
Linux sysfs2 |
Linux gpiolib |
Active low |
|---|---|---|---|---|
RESET |
GPIOAO_6 |
518 (507) |
gpiochip 0, line 6 |
0 |
BOOT |
GPIOAO_9 |
521 (510) |
gpiochip 0, line 9 |
1 |
- 2
в скобках указаны значения для Linux Kernel версии менее 6.2
Аппаратный сброс модуля беспроводной связи осуществляется путем записи логического уровня 1 в GPIO RESET процессора (см. таблицу выше).
Возврат в рабочий режим осуществляется путем записи логического уровня 0 в GPIO RESET процессора.
Управление режимом загрузки осуществляется путем записи 0 или 1 в GPIO BOOT процессора (см. таблицу выше).
Для модуля беспроводной связи Zigbee вход в режим загрузчика осуществляется при логическом уровне 0 на выводе BOOT во время сброса модуля Zigbee.
Переключение режимов происходит при включении или аппаратном сбросе модуля. Поэтому после смены логического уровня
на выводе BOOT модуля необходимо выполнить аппаратный сброс модуля.
Пример скрипта для перевода модуля Zigbee в режим загрузчика и прошивки:
#!/bin/bash
# Specify path to flash tool
FLASH_TOOL=/path/to/tool
OPTIONS="--example options"
FIRMWARE=/path/to/firmware
# Put module into bootloader mode
echo "${0}: Invoke Zigbee module bootloader ..."
echo 0 > /sys/class/gpio/gpio521/value
echo "${0}: Reset Zigbee module ..."
echo 1 > /sys/class/gpio/gpio518/value
sleep 1
echo 0 > /sys/class/gpio/gpio518/value
echo "${0}: Flash Zigbee module ..."
${FLASH_TOOL} ${OPTIONS} ${FIRMWARE}
# Reset and put module into normal mode
# Pull up module BOOT line
echo 1 > /sys/class/gpio/gpio521/value
echo "${0}: Reset Zigbee module ..."
echo 1 > /sys/class/gpio/gpio518/value
sleep 1
echo 0 > /sys/class/gpio/gpio518/value
Консоль
Консоль выведена на разъем Micro-USB (используемый также для питания контроллера) через установленный на плате преобразователь интерфейса USB-UART Silicon Labs CP2102.
Консоль подключена к порту UART_AO_A процессора Amlogic S905W.
Подсказка
Драйвер для преобразователя интерфейса USB-UART CP2102 для ОС Windows можно скачать на сайте производителя.
В Linux установка дополнительного драйвера, как правило, не требуется.
Конфигурация порта:
Скорость 115200 бит/сек
Длина данных 8 бит
Стоп-бит 1
Контроль четности не используется
Аппаратное управление потоком не используется
Электропитание
Питание контроллера осуществляется от стабилизированного источника постоянного тока +5В, через разъем MicroUSB. Потребляемая мощность - не более 5Вт (без учета внешних потребителей, подключенных к портам USB).
Для питания контроллера рекомендуется использовать блок питания, входящий в комплект поставки контроллера.
Примечание
При питании контроллера от компьютера или от другого устройства с интерфейсом USB, а также при использовании стороннего блока питания убедитесь, что данное устройство или блок питания способен обеспечить необходимую выходную мощность:
До 5Вт если к контроллеру не будут подключаться дополнительные устройства.
До 10Вт если к USB-портам контроллера будут подключаться дополнительные устройства, питающиеся от USB-порта.
Предупреждение
При питании контроллера от порта USB компьютера необходимо учитывать, что стандартный интерфейс USB 2.0 может ограничивать выходной ток на уровне 0,5А, что может быть недостаточно для нормальной работы контроллера под нагрузкой.
Программное обеспечение
Официально поддерживаемое программное обеспечение:
Примечание
Возможно также установить такие популярные системы для автоматизации: OpenHAB, NodeRed и другие, работающие на базе ОС Linux.
Прошивка контроллера
Подсказка
Актуальный образ прошивки для вашего устройства вы можете найти тут: JetHome firmware portal.
Перевод в режим прошивки

Отключить питание контроллера (разъем MicroUSB на задней стенке корпуса). Далее в процессе прошивки подключать его не нужно.
Открыть корпус контроллера, чтобы получить доступ к плате.
Замкнуть между собой штыревые контакты
Update, расположенные на плате контроллера около элемента питания.Подключить контроллер кабелем USB A - USB A к компьютеру.
Убедиться, что программа Burning Tool определила подключение к контроллеру.
Разомкнуть штыревые контакты
Update(Важно!).После чего запустить процесс прошивки контроллера.
Последующие действия процесса прошивки описаны Amlogic Burning Tool.
Прошивка
Рекомендуемые методы прошивки:
Прошивка из Windows осуществляется с помощью Amlogic Burning Tool.
Прошивка из Linux осуществляется с помощью Khadas Utils.
Кнопка BOOT

На обратной стороне контроллера, между интерфейсами Ethernet и microUSB, находится кнопка BOOT, утопленная в корпус.
Кнопка позволяет изменить порядок загрузки с eMMC на microSD карту или реализовать программную реакцию на нажатие.
Некоторые пользователи избыточным усилием отрывают кнопку от платы или наносят ей механическое повреждение. Тем самым, приводят ее в непригодность.
Меры безопасности
Не допускается попадание влаги на контакты выходных соединителей и внутренние элементы контроллера.
Контроллер запрещено использовать при наличии в атмосфере кислот, щелочей, масел и иных агрессивных веществ.
Контроллер не предназначен для использования на объектах, потенциально представляющих опасность для жизни и здоровья окружающих.
Не допускается подключать прибор к локальной сети Ethernet с выходом в сеть Internet без обеспечения надежных средств межсетевой защиты.
Условия эксплуатации
Температура окружающей среды: 0..+40 С.
Относительная влажность воздуха до 80% без конденсации влаги.
Закрытые взрывобезопасные помещения без агрессивных паров и газов.
Рекомендации по подключению
Для обеспечения надежности электрических соединений рекомендуется использовать медные многожильные кабели. Концы кабелей следует зачистить, потом залудить их или использовать кабельные наконечники. Жилы кабелей следует зачищать так, чтобы их оголенные концы после подключения к контроллеру не выступали за пределы клеммника.
Общие требования к линиям соединений:
Во время прокладки кабелей следует выделить линии связи, соединяющие устройство с датчиками или другими устройствами, в самостоятельные трассы, располагая их отдельно от силовых кабелей, а также от кабелей, создающих высокочастотные и импульсные помехи.
Для защиты входов устройства от влияния электромагнитных помех линии связи контроллера следует экранировать. В качестве экранов могут быть использованы специальные кабели с экранирующими оплетками.
В линии питания контроллера рекомендуется устанавливать фильтры сетевых помех.
В случае управления силовым оборудованием рекомендуется устанавливать искрогасящие фильтры на линии коммутации данного оборудования.
Ограничения
Предупреждение
Контроллер не предназначен для выполнения высоконагруженных задач в режиме «24/7», например, для обработки видео.